
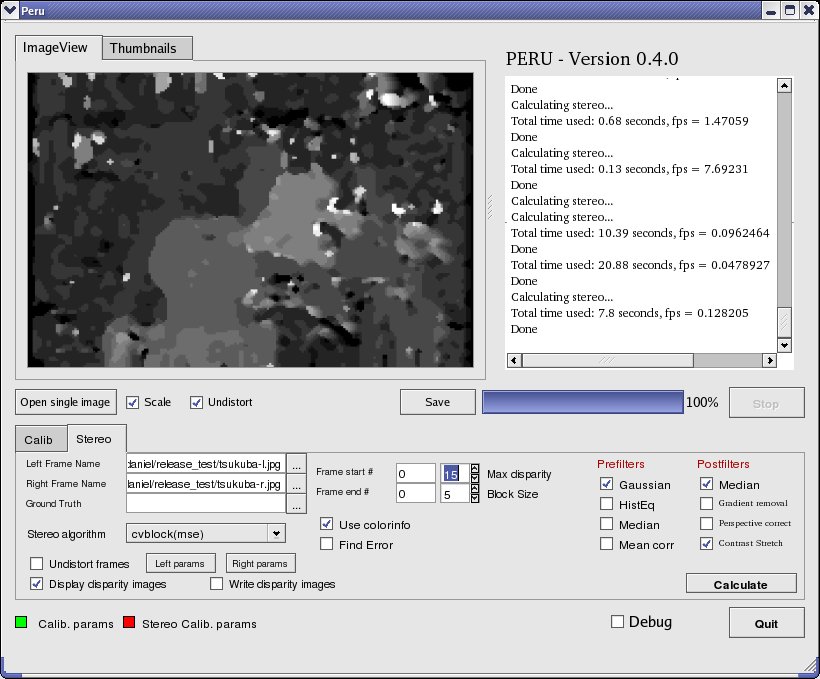
Above are screenshots from the 0.4.0 version released on 2005-07-02.
Old screenshot from version pre0.2
Peru provides functionality for calibrating a camera or a stereo camera using only images of a checkerboard pattern as input. Peru also provides functionality for calculating disparity maps (depth maps) from a stereo image pair. The application provides various post and prefilters for the stereo part which can be used in a combination of choice. Prefiltering for the calibration images supports a morphologigal top hat transform to deal with uneven lighting, and additional filters are easily added. Please also come with suggestions for useful improvements here.
Peru uses Intels OpenCv library for image processing and Trolltechs Qt for the user interface.
Project's homepage at sourceforge.net can be found here.
Above are screenshots from the 0.4.0 version released on 2005-07-02.
Old screenshot from version pre0.2
Downloads are available either as source or as a precompiled binary for linux.
{kind=link}